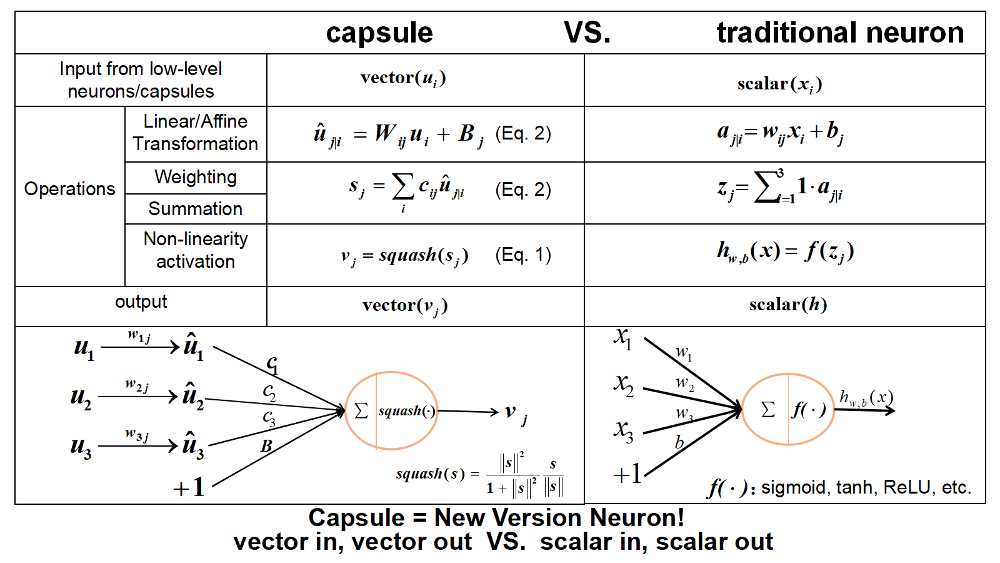
capsule网络
不同点
代码
此处是capsule第二代”Matrix Capsules with EM Routing”的代码,
由Central Florida University实现
将其运用到小视频(三个维度: W, H, Time)的分类, 训练集Caltech 101
caps_network.py1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393import config
import tensorflow as tf
from tensorflow.python import pywrap_tensorflow
import time
import numpy as np
from caps_layers import create_prim_conv3d_caps, create_dense_caps, layer_shape, create_conv3d_caps
def create_skip_connection(in_caps_layer, n_units, kernel_size, strides=(1, 1, 1), padding='VALID', name='skip',
activation=tf.nn.relu):
in_caps_layer = in_caps_layer[0]
batch_size = tf.shape(in_caps_layer)[0]
_, d, h, w, ch, _ = in_caps_layer.get_shape()
d, h, w, ch = map(int, [d, h, w, ch])
in_caps_res = tf.reshape(in_caps_layer, [batch_size, d, h, w, ch * 16])
return tf.layers.conv3d_transpose(in_caps_res, n_units, kernel_size=kernel_size, strides=strides, padding=padding,
use_bias=False, activation=activation, name=name)
class Caps3d(object):
def __init__(self, input_shape=(None, 8, 112, 112, 3)):
self.input_shape = input_shape
self.graph = tf.Graph()
with self.graph.as_default():
self.init_weights()
# inputs to the network
self.x_input = tf.placeholder(dtype=tf.float32, shape=self.input_shape)
self.y_input = tf.placeholder(dtype=tf.int32, shape=[None])
self.y_bbox = tf.placeholder(dtype=tf.float32, shape=(None, 8, 112, 112, 1))
self.is_train = tf.placeholder(tf.bool)
self.m = tf.placeholder(tf.float32, shape=())
# initializes the network
self.init_network()
# initializes the loss
self.cur_m = config.start_m
self.init_loss_and_opt()
# initializes the saver
self.saver = tf.train.Saver()
def init_weights(self):
with tf.device('/gpu:0'):
if config.use_c3d_weights:
reader = pywrap_tensorflow.NewCheckpointReader('./c3d_pretrained/conv3d_deepnetA_sport1m_iter_1900000_TF.model')
self.w_and_b = {
'wc1': tf.constant_initializer(reader.get_tensor('var_name/wc1')),
'wc2': tf.constant_initializer(reader.get_tensor('var_name/wc2')),
'wc3a': tf.constant_initializer(reader.get_tensor('var_name/wc3a')),
'wc3b': tf.constant_initializer(reader.get_tensor('var_name/wc3b')),
'wc4a': tf.constant_initializer(reader.get_tensor('var_name/wc4a')),
'wc4b': tf.constant_initializer(reader.get_tensor('var_name/wc4b')),
'wc5a': tf.constant_initializer(reader.get_tensor('var_name/wc5a')),
'wc5b': tf.constant_initializer(reader.get_tensor('var_name/wc5b')),
'bc1': tf.constant_initializer(reader.get_tensor('var_name/bc1')),
'bc2': tf.constant_initializer(reader.get_tensor('var_name/bc2')),
'bc3a': tf.constant_initializer(reader.get_tensor('var_name/bc3a')),
'bc3b': tf.constant_initializer(reader.get_tensor('var_name/bc3b')),
'bc4a': tf.constant_initializer(reader.get_tensor('var_name/bc4a')),
'bc4b': tf.constant_initializer(reader.get_tensor('var_name/bc4b')),
'bc5a': tf.constant_initializer(reader.get_tensor('var_name/bc5a')),
'bc5b': tf.constant_initializer(reader.get_tensor('var_name/bc5b'))
}
else:
self.w_and_b = {
'wc1': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'wc2': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'wc3a': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'wc3b': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'wc4a': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'wc4b': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'wc5a': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'wc5b': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'bc1': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'bc2': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'bc3a': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'bc3b': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'bc4a': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'bc4b': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'bc5a': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32),
'bc5b': tf.random_normal_initializer(mean=0.0, stddev=0.1, seed=None, dtype=tf.float32)
}
def init_network(self):
print('Building Caps3d Model')
with tf.device('/gpu:1'):
# creates the video encoder
conv1 = tf.layers.conv3d(self.x_input, 64, kernel_size=[3, 3, 3], padding='SAME', strides=[1, 1, 1],
activation=tf.nn.relu, kernel_initializer=self.w_and_b['wc1'],
bias_initializer=self.w_and_b['bc1'], name='conv1')
conv2 = tf.layers.conv3d(conv1, 128, kernel_size=[3, 3, 3], padding='SAME', strides=[1, 2, 2],
activation=tf.nn.relu, kernel_initializer=self.w_and_b['wc2'],
bias_initializer=self.w_and_b['bc2'], name='conv2')
conv3 = tf.layers.conv3d(conv2, 256, kernel_size=[3, 3, 3], padding='SAME', strides=[1, 1, 1],
activation=tf.nn.relu, kernel_initializer=self.w_and_b['wc3a'],
bias_initializer=self.w_and_b['bc3a'], name='conv3')
conv4 = tf.layers.conv3d(conv3, 256, kernel_size=[3, 3, 3], padding='SAME', strides=[1, 2, 2],
activation=tf.nn.relu, kernel_initializer=self.w_and_b['wc3b'],
bias_initializer=self.w_and_b['bc3b'], name='conv4')
conv5 = tf.layers.conv3d(conv4, 512, kernel_size=[3, 3, 3], padding='SAME', strides=[1, 1, 1],
activation=tf.nn.relu, kernel_initializer=self.w_and_b['wc4a'],
bias_initializer=self.w_and_b['bc4a'], name='conv5')
conv6 = tf.layers.conv3d(conv5, 512, kernel_size=[3, 3, 3], padding='SAME', strides=[1, 1, 1],
activation=tf.nn.relu, kernel_initializer=self.w_and_b['wc4b'],
bias_initializer=self.w_and_b['bc4b'], name='conv6')
if config.print_layers:
print('Conv1:', conv1.get_shape())
print('Conv2:', conv2.get_shape())
print('Conv3:', conv3.get_shape())
print('Conv4:', conv4.get_shape())
print('Conv5:', conv5.get_shape())
print('Conv6:', conv6.get_shape())
# creates the primary capsule layer: conv caps1
prim_caps = create_prim_conv3d_caps(conv6, 32, kernel_size=[3, 9, 9], strides=[1, 1, 1], padding='VALID',
name='prim_caps')
# creates the secondary capsule layer: conv caps2
sec_caps = create_conv3d_caps(prim_caps, 32, kernel_size=[3, 5, 5], strides=[1, 2, 2],
padding='VALID', name='sec_caps', route_mean=True)
# creates the final capsule layer: class caps
pred_caps = create_dense_caps(sec_caps, config.n_classes, subset_routing=-1, route_min=0.0,
name='pred_caps', coord_add=True, ch_same_w=True)
if config.print_layers:
print('Primary Caps:', layer_shape(prim_caps))
print('Second Caps:', layer_shape(sec_caps))
print('Prediction Caps:', layer_shape(pred_caps))
# obtains the activations of the class caps layer and gets the class prediction
self.digit_preds = tf.reshape(pred_caps[1], (-1, config.n_classes))
self.predictions = tf.cast(tf.argmax(input=self.digit_preds, axis=1), tf.int32)
pred_caps_poses = pred_caps[0]
batch_size = tf.shape(pred_caps_poses)[0]
_, n_classes, dim = pred_caps_poses.get_shape()
n_classes, dim = map(int, [n_classes, dim])
# masks the capsules that are not the ground truth (training) or the prediction (testing)
vec_to_use = tf.cond(self.is_train, lambda: self.y_input, lambda: self.predictions)
vec_to_use = tf.one_hot(vec_to_use, depth=n_classes)
vec_to_use = tf.tile(tf.reshape(vec_to_use, (batch_size, n_classes, 1)), multiples=[1, 1, dim])
masked_caps = pred_caps_poses * tf.cast(vec_to_use, dtype=tf.float32)
masked_caps = tf.reshape(masked_caps, (batch_size, n_classes * dim))
# creates the decoder network
recon_fc1 = tf.layers.dense(masked_caps, 4 * 8 * 8 * 1, activation=tf.nn.relu, name='recon_fc1')
recon_fc1 = tf.reshape(recon_fc1, (batch_size, 4, 8, 8, 1))
deconv1 = tf.layers.conv3d_transpose(recon_fc1, 128, kernel_size=[1, 3, 3], strides=[1, 1, 1],
padding='SAME', use_bias=False, activation=tf.nn.relu, name='deconv1')
skip_connection1 = create_skip_connection(sec_caps, 128, kernel_size=[1, 3, 3], strides=[1, 1, 1],
padding='SAME', name='skip_1')
deconv1 = tf.concat([deconv1, skip_connection1], axis=-1)
deconv2 = tf.layers.conv3d_transpose(deconv1, 128, kernel_size=[3, 6, 6], strides=[1, 2, 2],
padding='VALID', use_bias=False, activation=tf.nn.relu, name='deconv2')
skip_connection2 = create_skip_connection(prim_caps, 128, kernel_size=[1, 3, 3], strides=[1, 1, 1],
padding='SAME', name='skip_2')
deconv2 = tf.concat([deconv2, skip_connection2], axis=-1)
deconv3 = tf.layers.conv3d_transpose(deconv2, 256, kernel_size=[3, 9, 9], strides=[1, 1, 1],
padding='VALID',
use_bias=False, activation=tf.nn.relu, name='deconv3')
deconv4 = tf.layers.conv3d_transpose(deconv3, 256, kernel_size=[1, 3, 3], strides=[1, 2, 2], padding='SAME',
use_bias=False, activation=tf.nn.relu, name='deconv4')
deconv5 = tf.layers.conv3d_transpose(deconv4, 256, kernel_size=[1, 3, 3], strides=[1, 2, 2], padding='SAME',
use_bias=False, activation=tf.nn.relu, name='deconv5')
self.segment_layer = tf.layers.conv3d(deconv5, 1, kernel_size=[1, 3, 3], strides=[1, 1, 1],
padding='SAME', activation=None, name='segment_layer')
self.segment_layer_sig = tf.nn.sigmoid(self.segment_layer)
if config.print_layers:
print('Deconv Layer 1:', deconv1.get_shape())
print('Deconv Layer 2:', deconv2.get_shape())
print('Deconv Layer 3:', deconv3.get_shape())
print('Deconv Layer 4:', deconv4.get_shape())
print('Deconv Layer 5:', deconv5.get_shape())
print('Segmentation Layer:', self.segment_layer.get_shape())
def init_loss_and_opt(self):
with tf.device('/gpu:0'):
y_onehot = tf.one_hot(indices=self.y_input, depth=config.n_classes)
# get a_t
a_i = tf.expand_dims(self.digit_preds, axis=1)
y_onehot2 = tf.expand_dims(y_onehot, axis=2)
a_t = tf.matmul(a_i, y_onehot2)
# calculate spread loss
spread_loss = tf.square(tf.maximum(0.0, self.m - (a_t - a_i)))
spread_loss = tf.matmul(spread_loss, 1. - y_onehot2)
self.class_loss = tf.reduce_sum(tf.reduce_sum(spread_loss, axis=[1, 2]))
# segmentation loss
segment = tf.contrib.layers.flatten(self.segment_layer)
y_bbox = tf.contrib.layers.flatten(self.y_bbox)
self.segmentation_loss = tf.reduce_sum(tf.nn.sigmoid_cross_entropy_with_logits(labels=y_bbox, logits=segment))
self.segmentation_loss = config.segment_coef * self.segmentation_loss
# accuracy of a given batch
correct = tf.cast(tf.equal(self.predictions, self.y_input), tf.float32)
self.tot_correct = tf.reduce_sum(correct)
self.accuracy = tf.reduce_mean(correct)
self.total_loss = self.class_loss + self.segmentation_loss
optimizer = tf.train.GradientDescentOptimizer(learning_rate=config.learning_rate)
#optimizer = tf.train.AdamOptimizer(learning_rate=config.learning_rate, beta1=config.beta1, name='Adam',
# epsilon=config.epsilon)
self.train_op = optimizer.minimize(loss=self.total_loss)
def train(self, sess, data_gen):
with tf.device('/gpu:0'):
start_time = time.time()
# continues until no more training data is generated
losses, batch, acc, s_losses = 0, 0, 0, 0
while data_gen.has_data():
x_batch, bbox_batch, y_batch = data_gen.get_batch(config.batch_size)
# runs network on batch
_, loss, s_loss, preds, seg, seg_sig, y_b = sess.run([self.train_op, self.class_loss, self.segmentation_loss,
self.digit_preds, self.segment_layer, self.segment_layer_sig, self.y_bbox],
feed_dict={self.x_input: x_batch, self.y_input: y_batch,
self.m: self.cur_m, self.is_train: True,
self.y_bbox: bbox_batch})
print("preds is")
print(preds)
print("pred_batch is")
print(np.argmax(preds, axis=1))
print("y_batch is")
print(np.asarray(y_batch))
# accumulates loses and accuracies
acc += np.sum(np.argmax(preds, axis=1) == np.array(y_batch))/config.batch_size
losses += loss
s_losses += s_loss
batch += 1
print("acc is")
print(acc / batch)
print("class_loss is")
print(losses / batch)
print("seg_loss is")
print(s_losses / batch)
print("max of seg_layer")
print(seg.max())
print("max of seg_layer_sig")
print(seg_sig.max())
print("max of y_bbox")
print(y_b.max())
print('\n')
del x_batch, bbox_batch, y_batch
# prints the loss and accuracy statistics after a certain number of batches
if batch % config.batches_until_print == 0:
print(preds[0][:10]) # prints activations just in case of numerical instability
print('Finished %d batches. %d(s) since start. Avg Classification Loss is %.4f. '
'Avg Segmentation Loss is %.4f. Accuracy is %.4f.'
% (batch, time.time()-start_time, losses / batch, s_losses / batch, acc / batch))
# prints the loss and accuracy statistics for the entire epoch
print(preds[0][:10]) # prints activations just in case of numerical instability
print('Epoch finished in %d(s). Avg Classification loss is %.4f. Avg Segmentation Loss is %.4f. '
'Accuracy is %.4f.'
% (time.time() - start_time, losses / batch, s_losses / batch, acc / batch))
return losses / batch, s_losses / batch, acc / batch
def eval(self, sess, data_gen, validation=True):
mlosses, slosses, corrs = [], [], 0
conf_matrix = np.zeros((config.n_classes, config.n_classes), dtype=np.int32)
start_time = time.time()
batch = 0
for i in range(data_gen.n_videos):
video, bbox, label = data_gen.get_next_video()
# gets losses and predictionfor a single video
mloss, sloss, pred = self.eval_on_vid(sess, video, bbox, label, validation)
# accumulates video statistics
conf_matrix[label, pred] += 1
mlosses.append(mloss)
slosses.append(sloss)
corrs += (1 if pred == label else 0)
batch += 1
# print statistics every 500 videos
if batch % 500 == 0:
print('Tested %d videos. %d(s) since start. Avg Accuracy is %.4f'
% (batch, time.time() - start_time, float(corrs) / batch))
# print evaluation statistics for all evaluation videos
print('Evaluation done in %d(s).' % (time.time() - start_time))
print('Test Classification Loss: %.4f. Test Segmentation Loss: %.4f. Accuracy: %.4f.'
% (float(np.mean(mlosses)), float(np.mean(slosses)), float(corrs) / data_gen.n_videos))
return np.mean(mlosses), np.mean(slosses), float(corrs) / data_gen.n_videos, conf_matrix
def eval_on_vid(self, sess, video, bbox, label, validation):
losses, slosses, norms = [], [], []
frames, _, _, _ = video.shape
# ensures the video is trimmed and separate video into clips of 8 frames
f_skip = config.frame_skip
clips = []
n_frames = video.shape[0]
for i in range(0, video.shape[0], 8 * f_skip):
for j in range(f_skip):
b_vid, b_bbox = [], []
for k in range(8):
ind = i + j + k * f_skip
if ind >= n_frames:
b_vid.append(np.zeros((1, 112, 112, 3), dtype=np.float32))
b_bbox.append(np.zeros((1, 112, 112, 1), dtype=np.float32))
else:
b_vid.append(video[ind:ind + 1, :, :, :])
b_bbox.append(bbox[ind:ind + 1, :, :, :])
clips.append((np.concatenate(b_vid, axis=0), np.concatenate(b_bbox, axis=0), label))
if clips[-1][1].sum() == 0:
clips.pop(-1)
if len(clips) == 0:
print('Video has no bounding boxes')
return 0, 0, 0, 0, 0
# groups clips into batches
batches, gt_segmentations = [], []
for i in range(0, len(clips), config.batch_size):
x_batch, bb_batch, y_batch = [], [], []
for j in range(i, min(i + config.batch_size, len(clips))):
x, bb, y = clips[j]
x_batch.append(x)
bb_batch.append(bb)
y_batch.append(y)
batches.append((x_batch, bb_batch, y_batch))
gt_segmentations.append(np.stack(bb_batch))
# if doing validation, only do one batch per video
if validation:
batches = batches[:1]
# runs the network on the clips
n_clips = 0
for x_batch, bbox_batch, y_batch in batches:
loss, sloss, norm = sess.run([self.class_loss, self.segmentation_loss, self.digit_preds],
feed_dict={self.x_input: x_batch, self.y_input: y_batch,
self.m: 0.9, self.is_train: False,
self.y_bbox: bbox_batch})
n_clips_in_batch = len(x_batch)
losses.append(loss * n_clips_in_batch)
slosses.append(sloss * n_clips_in_batch)
norms.append(norm)
n_clips += n_clips_in_batch
# calculates network prediction
if len(norms) > 1:
concat_norms = np.concatenate(norms, axis=0)
else:
concat_norms = norms[0]
norm_mean = np.mean(concat_norms, axis=0)
pred = np.argmax(norm_mean)
# gets average losses
fin_mloss = float(np.sum(losses) / n_clips)
fin_sloss = float(np.sum(slosses) / n_clips)
return fin_mloss, fin_sloss, pred
def save(self, sess, file_name):
# saves the model
save_path = self.saver.save(sess, file_name)
print("Model saved in file: %s" % save_path)
def load(self, sess, file_name):
# loads the model
self.saver.restore(sess, file_name)
print('Model restored from file: %s' % file_name)